ข้อควรรู้เรื่องมอเตอร์ VFD
- Dec 18, 2025
- 2 min read
เครื่องจักรอุปกรณ์ไฟฟ้าในงานอุตสาหกรรมจะทำงานคงที่อย่างต่อเนื่อง ไม่สามารถปรับเปลี่ยนความเร็วรอบตามจังหวะความต้องการของงานได้ เมื่อใช้VFD(variable frequency drive)ควบคุมการทำงานของอินดักชั่นมอเตอร์จึงทำให้สามารถปรับการทำงานของมอเตอร์ตามความต้องการของจังหวะของเครื่องจักรอุปกรณ์ จึงทำให้เครื่องจักรอุปกรณ์มีประสิทธิภาพสูงขึ้น ลดค่าไฟฟ้าและลดการเกิดคาร์บอนไดออกไซด์
การทำงานของเครื่องจักรอุปกรณ์แบ่งออกตามลักษณะงาน งานที่ต้องการแรงบิดคงที่ได้แก่สายพานระบบส่ง รอกและเครน ลิฟท์ รถยนต์ไฟฟ้า และปั๊มอัด(positive displacement) และงานที่เปลี่ยนแปลงแรงบิดตามความเร็วได้แก่ปั๊มแรงเหวี่ยงและพัดลม VFDต้องเหมาะสมกับลักษณะของงานเพื่อให้สามารถทำงานได้ตลอดช่วงการทำงาน
VFDทำงานด้วยการควบคุมปรับเปลี่ยนแรงดันและความถี่ของระบบไฟฟ้าเพื่อจ่ายให้มอเตอร์ ทำให้มอเตอร์มีแรงบิดที่เหมาะสมตั้งแต่เริ่มหมุนจนถึงรอบระบุของมอเตอร์ จึงเหมาะสำหรับปรับกำลังของมอเตอร์ตามความต้องการของงานประเภทต่างๆ และทำให้สามารถใช้มอเตอร์ที่ความเร็วสูงกว่าความเร็วระบุได้ สามารถใช้เป็นระบบ Soft start เพื่อไม่ให้มีผลกระทบต่อระบบจ่ายไฟฟ้า
สำหรับมอเตอร์ทั่วไปการปรับลดความเร็วรอบไม่เกิดความเสียหายแก่มอเตอร์ แต่การเปลี่ยนความเร็วรอบสูงกว่าความเร็วระบุของมอเตอร์อาจมีผลต่อชิ้นส่วนเชิงกลได้แก่ ลูกปืน การสั่นสะเทือน เสียง และอื่นๆ จึงเป็นการตัดสินใจของผู้ใช้เอง และต้องให้ความระมัดระวังเป็นพิเศษ เพื่อความปลอดภัยควรใช้มอเตอร์ที่ออกแบบรองรับความเร็วสูงกว่าความเร็วระบุร่วมกับVFD บทความนี้อธิบายถึงสิ่งที่ผู้ใช้มอเตอร์ควรรู้เมื่อจะใช้VFDกับอินดักชั่นมอเตอร์ได้แก่
- ข้อมูลของมอเตอร์จากเนมเพลท
- แรงบิดของมอเตอร์ที่ความเร็วรอบต่างๆ
- ผลของแรงดันไฟฟ้าที่มีต่อการทำงานของชุดมอเตอร์
ข้อมูลจากเนมเพลทของมอเตอร์
เมื่อคำนวณแรงบิดและความเร็วรอบที่ต้องการของงานได้ ก็สามารถเลือกมอเตอร์ที่เหมาะสมและเลือกVFD.ให้เหมาะสมกับมอเตอร์ ข้อมูลของมอเตอร์ที่หาได้ง่ายที่สุดสำหรับใช้เลือกมอเตอร์คือข้อมูลจากเนมเพลทที่ติดตั้งอยู่ที่ตัวถังของมอเตอร์
ข้อมูลจากเนมเพลทของมอเตอร์ที่ออกแบบสำหรับใช้VFDตามรูปที่ 1. เป็นอินดักชั่นมอเตอร์ 4 ขั้ว(poles) กำลังมอเตอร์สูงสุด 10แรงม้า เมื่อใช้กับVFDสามารถปรับความถี่ได้ถึง 120Hz. ใช้กับระบบไฟฟ้า 60 Hz. แรงดันไฟฟ้า 230/460 โวลท์ แสดงว่ามอเตอร์เมื่อใช้กับแรงดันไฟฟ้า 230โวลท์ ที่ภาระระบุใช้กระแสไฟฟ้า 27แอมป์ และเมื่อใช้แรงดันไฟฟ้า 460โวลท์ที่ภาระสูงสุดใช้กระแสไฟฟ้า 13.5แอมป์ การทำงานตามวงแดงในรูป มอเตอร์หยุดนิ่งให้แรงบิด 29.5 ฟุตปอนด์ ใช้กระแสไฟฟ้า 13.5แอมป์ ให้แรงบิดและกระแสไฟฟ้าคงที่ถึงความเร็วรอบระบุ 1774รอบ/นาที(ความถี่ 60Hz) เมื่อความเร็วรอบมากขึ้นจนมีความเร็วรอบ 3540รอบ/นาทีหรือความถี่ 120 Hz. แรงบิดลดลงเป็น 14.8ฟุตปอนด์ ใช้กระแสไฟฟ้า 12.5แอมป์
รูปที่ 1. เนมเพลทของมอเตอร์แสดงข้อมูลการทำงานเมื่อใช้กับ VFD (จาก Yasakawa America Inc.)

เนมเพลทของมอเตอร์ ABB ตามรูปที่ 2. เป็นอินดักชั่นมอเตอร์ 2ขั้ว กำลังทอเตอร์ระบุ 5.5kW ความถี่ไฟฟ้า 50Hz มีความเร็วรอบที่กำลังระบุ 2915รอบ/นาที มีฉนวนระดับเอฟ(Class F) ใช้แรงดันไฟฟ้าได้ 3ระดับขึ้นกับวิธีการต่อขั้วสายทำให้มอเตอร์ใช้กระแสไฟฟ้าต่างกัน ส่วนข้อมูลแรงบิดไม่ได้แสดงไว้แต่สามารถคำนวณได้ตามที่จะอธิบายในข้อต่อไป
รูปที่ 2. เนมเพลทของมอเตอร์ABBแสดงข้อมูลการทำงาน

ผู้ผลิตจะไม่รับประกันมอเตอร์ถ้าไม่ใช้งานตามที่ระบุ ถ้าต้องการใช้ความเร็วสูงกว่าความเร็วระบุอาจมีข้อจำกัดของชิ้นส่วนเชิงกลของมอเตอร์ได้แก่ลูกปืน ความสั่นสะเทือน เสียง การสึกหรอและอื่นๆ ผู้ใช้จึงต้องตัดสินใจอย่างรอบคอบโดยมีข้อมูลทางเทคนิคสนับสนุน สำหรับการปรับลดความเร็วรอบจากความเร็วระบุไม่ทำให้เกิดความเสียหายแก่มอเตอร์ จึงสามารถใช้VFDได้ ข้อควรระวังคือถ้าใช้ที่ความเร็วต่ำเป็นเวลานาน มอเตอร์ปิดมิดชิดแบบระบายความร้อนด้วยพัดลม(TEFC, Totally enclosed fan cooled)จะทำให้การระบายความร้อนไม่เพียงพอ ควรเป็นมอเตอร์ที่มีฉนวนระดับเอฟ(Class F) ซึ่งทนอุณหภูมิ 155°C, มอเตอร์ที่มีฉนวนระดับบี(Class B) ซึ่งทนอุณหภูมิ 130°C
การคำนวณสภาพการทำงานของมอเตอร์
มอเตอร์ที่ใช้งานเป็นเวลานาน ถ้าไม่มีเนมเพลท ควรวัดความเร็วรอบของมอเตอร์ขณะทำงานที่กำลังระบุ(ภาระสูงสุด) วัดแรงดันไฟฟ้า กระแสไฟฟ้า เพาว์เวอร์แฟคเตอร์และคำนวณการทำงานของมอเตอร์ และเปรียบเทียบข้อมูล ความเร็วรอบที่วัดได้จะใช้เป็นความเร็วระบุใช้เปรียบเทียบกับตารางที่ 1. เพื่อหาจำนวนขั้ว(poles) ความเร็วซิงโครนัส และใช้สมการที่ 2. คำนวนกำลังของมอเตอร์
ตารางที่ 1. แสดงความเร็วซิงโครนัส และค่าโดยประมาณของความเร็วที่ภาระระบุ โดยใช้จำนวนขั้วและความถี่ระบบไฟฟ้าที่จ่ายให้มอเตอร์คำนวณแทนค่าในสมการที่ 1.
ns = f (2 / p) 60…………………………………………………………………………………………………………….(1)
เมื่อ ns = ความเร็วรอบซิงโครนัส(synchronous speed) ของมอเตอร์ (rpm)
f = ความถี่ของระบบไฟฟ้ากำลังเข้ามอเตอร์ (Hz, cycles/sec)
p = จำนวนขั้วของมอเตอร์
ตารางที่ 1. ความเร็วซิงโครนัสและความเร็วรอบที่ภาระสูงสุดของมอเตอร์โดยประมาณของอินดักชั่นมอเตอร์ https://www.engineeringtoolbox.com/synchronous-full-load-speed-induction-motors-d_1448.html

แรงบิดของมอเตอร์คำนวณจากแรงบิดของงานเช่น พัดลม เครื่องสูบน้ำ และอื่นๆจะไม่อธิบายในที่นี้ แทนค่าแรงบิดลงในสมการที่ 2. จะได้ค่ากำลังมอเตอร์ หรือกำลังระบุของมอเตอร์
P = T n / 0.009549 ……………………………………………………………………..…………………………………..(2.)
เมื่อ P = กำลังของมอเตอร์ (kW)
T = แรงบิด (Nm)
n = ความเร็วรอบ(rpm)ที่วัดได้
เมื่อแทนค่าจากการวัดทางไฟฟ้าลงในสมการที่ 3.จะได้กำลังไฟฟ้าที่จ่ายให้มอเตอร์ และค่าจากสมการที่ 2. หารด้วยสมการที่ 3. คือประสิทธิภาพของชุดมอเตอร์
Pi = 3^1/2 V I pf / 1000.......………………………………………………………………………………………………(3.)
เมื่อ Pi = กำลังจากระบบจ่ายไฟ (kW)
V = แรงดันไฟฟ้า (โวลท์)
I = กระแส (แอมป์)
pf = เพาว์เวอร์แฟคเตอร์
จากสมการที่ 2. เมื่อใช้VFDควบคุมมอเตอร์ถ้าใช้มอเตอร์ 8ขั้ว ความเร็วรอบลดลง กำลังของมอเตอร์จะลดลง ถ้าใช้มอเตอร์ 4ขั้ว ความเร็วรอบเพิ่มขึ้น หรืองานต้องการแรงบิดของมอเตอร์เพิ่มขึ้น อาจต้องเปลี่ยนมอเตอร์และชุดควบคุมVFDเพื่อความเหมาะสม
VFDควบคุมมอเตอร์อย่างไร
มอเตอร์ทั่วไปออกแบบเพื่อการทำงานที่ความเร็วรอบคงที่ ความถี่ไฟฟ้ามีผลต่อความเร็วรอบ แรงดันไฟฟ้ามีผลกับแรงบิดของมอเตอร์ รูปที่ 3.แสดงการทำงานของมอเตอร์ซึ่งใช้กับแรงดันไฟฟ้า 460โวลท์และความถี่ 60Hz. เมื่อVFDปรับความถี่โดยให้แรงดันไฟฟ้าเท่าเดิม จะเห็นว่าแรงบิดมีค่าเปลี่ยนแปลงตามแรงดันไฟฟ้าดังนั้นที่แรงดัน 460โวลท์ แรงบิดจะคงที่ตั้งแต่เริ่มหมุนจนถึงความถี่ระบุ 60Hz. เมื่อความถี่สูงกว่าความถี่ระบุVFDไม่สามารถรักษาแรงดันไฟฟ้าได้จึงทำให้แรงบิดลดลงค่อนข้างเร็ว ส่วนกำลังมอเตอร์จะเพิ่มขึ้นตามความถี่จนถึงกำลังระบุแล้วจึงมีค่าคงที่เพื่อไม่ให้มอเตอร์ทำงานเกินกำลัง
รูปที่ 3. ความสัมพันธ์ของแรงดันไฟฟ้า ความถี่ กำลังและแรงบิดของมอเตอร์ (Yasakawa American Inc.)
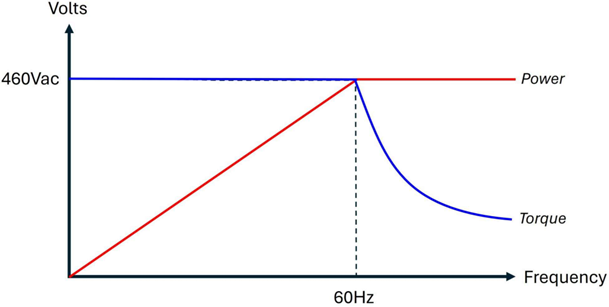
จากรูปที่ 3. อัตราส่วน V/f จะมีค่าจากมากไปน้อย เนื่องจากอัตราส่วน V/f มีผลต่อความเข้มสนามแม่เหล็กในมอเตอร์ อัตราส่วน V/f น้อยเกินไปจะทำให้แรงบิดของมอเตอร์น้อย อัตราส่วน V/f มากเกินไปจะทำให้สนามแม่เหล็กอิ่มตัวไม่สามารถเพิ่มแรงบิดได้ทำให้ประสิทธิภาพต่ำและเกิดความร้อนสูง VFDจึงถูกออกแบบให้มีอัตราส่วนV/f ที่เหมาะสมเพื่อประสิทธิภาพและความมั่นคงในการทำงาน อัตราส่วนV/f มีค่า 7.5 -1 เมื่อแรงดันเพิ่มขึ้นเป็นสัดส่วนกับความถี่ทำให้มอเตอร์เริ่มต้นหมุนโดยไม่ใช้กระแสสูงจึงไม่มีผลกระทบต่อระบบจ่ายไฟฟ้าหรือ Soft startนั่นเอง
รูปที่ 4. แสดงข้อมูลSOA(Safe Operating Area แรงบิดสูงสุดที่มอเตอร์ทำงานได้โดยไม่เกิดความเสียหายเนื่องจากความร้อน)ของมอเตอร์ ความถี่ไฟฟ้าที่VFDจ่ายให้มอเตอร์ในช่วงต้นมีแรงบิดน้อยไม่สามารถหมุนมอเตอร์ได้
รูปที่ 4. ความสัมพันธ์ของแรงบิด ความเร็วรอบมอเตอร์กับความถี่ไฟฟ้าจากVFD ของมอเตอร์ 4ขั้ว ความถี่ระบ 60Hz
The Engineer’s Guide to Driving 3-Phase AC Induction Motors with Inverters, Bodine Electric’s Motor University

การเลือกVFD(variable frequency drive)
การเลือกมอเตอร์ที่ถูกต้องจะต้องเข้าใจความต้องการของเครื่องจักรอุปกรณ์ และการเลือกVFDจะต้องรองรับการทำงานของมอเตอร์ VFDช่วยให้แรงดันไฟฟ้าที่จ่ายให้มอเตอร์มีความเสถียร ช่วยยืดอายุการทำงานของมอเตอร์โดยเฉพะอย่างยิ่งในพื้นที่ซึ่งแรงดันไฟฟ้าไม่เสถียร
สรุปข้อแนะนำสำหรับการเลือกมอเตอร์และVFDหลังจากที่ได้ข้อมูลแรงบิดของเครื่องจักรอุปกรณ์ที่ใช้มอเตอร์และข้อมูลระบบจ่ายไฟฟ้า
- หาข้อมูลของมอเตอร์ว่าผลิตสำหรับใช้กับVFDโดยดูจากเนมเพลทของมอเตอร์
- การเลือกVFDจะต้องให้กระแสสูงสุดจากงVFDมากกว่า/เท่ากับกระแสสูงสุดของมอเตอร์ และแรงดันขอVFDต้องเท่ากับแรงดันตามเนมเพลทของมอเตอร์
- VFDต้องมีการทำงานตามลักษณะงานได้แก่แรงบิดคงที่ หรือแรงบิดเปลี่ยนแปลงตามความเร็วโดยมีอัตราส่วน V/f ที่เหมาะสม
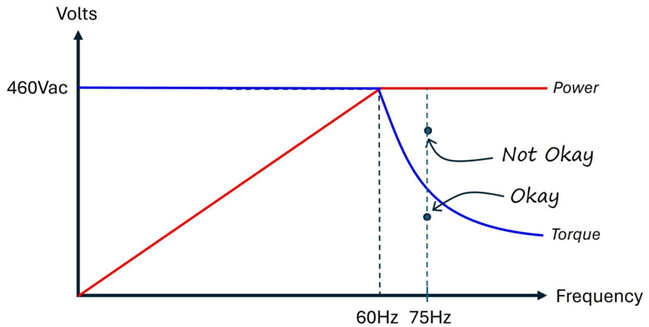
- เมื่อต้องการได้ความเร็วรอบมากกว่าความเร็วระบุ จะต้องตรวจสอบว่าที่ความเร็วรอบนั้นต้องการแรงบิดของมอเตอร์เท่าไรและมอเตอร์สามารถให้แรงบิดนั้ได้หรือไม่ ยกตัวอย่างตามรูปที่ 5. ต้องการให้พัดลมทำงานที่ 75Hz. เพื่อให้ได้การไหลของอากาศตามที่ต้องการแต่มอเตอร์มีการทำงานระบุที่ 60Hz. ผู้ใช้จึงต้องทราบแรงบิดที่ต้องการก่อนที่จะเลือกมอเตอร์และVFD อาจต้องใช้มอเตอร์ที่มีกำลังมากขึ้นโดยคำนวณจากสมการที่ 2.
รูปที่ 5. แรงบิดของมอเตอร์ และแรงบิดของงานเหมาะสมกับมอเตอร์ (Yasakawa American Inc.)
หลีกเลี่ยงความผิดพลาดในการใช้VFD
แรงดันไฟฟ้าโดยปกติจะมากขึ้นหรือน้อยลงเนื่องจากความดนตกของสายไฟฟ้าตามระยะห่างจากสถานีไฟฟ้า ซึ่งมอเตอร์จะยอมรับแรงดันไฟฟ้าเปลี่ยนแปลงได้ -10% ถึง +10% จึงต้องตรวจสอบแรงดันไฟฟ้าตกเนื่องจากจะทำให้แรงบิดของมอเตอร์ลดลงอาจทำให้ไม่สามารถขับเครื่องจักรอุปกรณ์ได้ รูปที่ 6.เป็นต้วอย่างการเปลี่ยนแปลงการทำงานของมอเตอร์ที่เกิดจากการเปลี่ยนแปลงของแรงดันไฟฟ้า
รูปที่ 6. การเปลี่ยนแปลงการทำงานของมอเตอร์เมื่อแรงดันไฟฟ้าเปลี่ยนแปลงEASA - The Electro•Mechanical Authority




Comments